AI/ML Engineer with dual M.Sc. in Robotics/AI (TUM) and Physics (TUB), specializing in Large Language Models and 3D computer vision. Professional experience at Aleph Alpha, ExoMatter, and appliedAI, with research contributions in computer vision at Niessnerlab and molecular spectroscopy at TUB.
My research interests primarily lie in inverse rendering and neural reconstruction, which are pivotal in reconstructing 3D scenes and estimating plausible material and scene parameters from a collection of images. I previously played around with 3D representations (e.g. voxels, meshes, pointclouds & implicit representations), efficient local and global feature extraction and classical CV pipelines for object recognition, pose estimation and camera tracking.
Prior to my pivot to computer vision and machine learning research I conducted research on bio-molecules in the gas phase at cryogenic temperatues at TU-Berlin.
Have a look at the images, videos, Github repos and the linked reports for more information on the work done!
In my master's thesis, titled "NeRF with Depth and Normal Constraints," I explored the potential of Neural Radiance Fields (NeRFs) in reconstructing 3D scenes from 2D images. The primary objective was to enhance the efficiency and accuracy of NeRFs by incorporating auxiliary image features, specifically depth and normal maps. This investigation culminated in the formulation of an innovative loss function for depth supervision. By deriving this function directly from a Gaussian likelihood of the transmittance function for a ray traversing a neural radiance field, I was able to surpass the prevailing state-of-the-art methods on widely-used datasets like ScanNet and Blender scenes. The scenes depicted herin are reconstructed from less than 20 images.
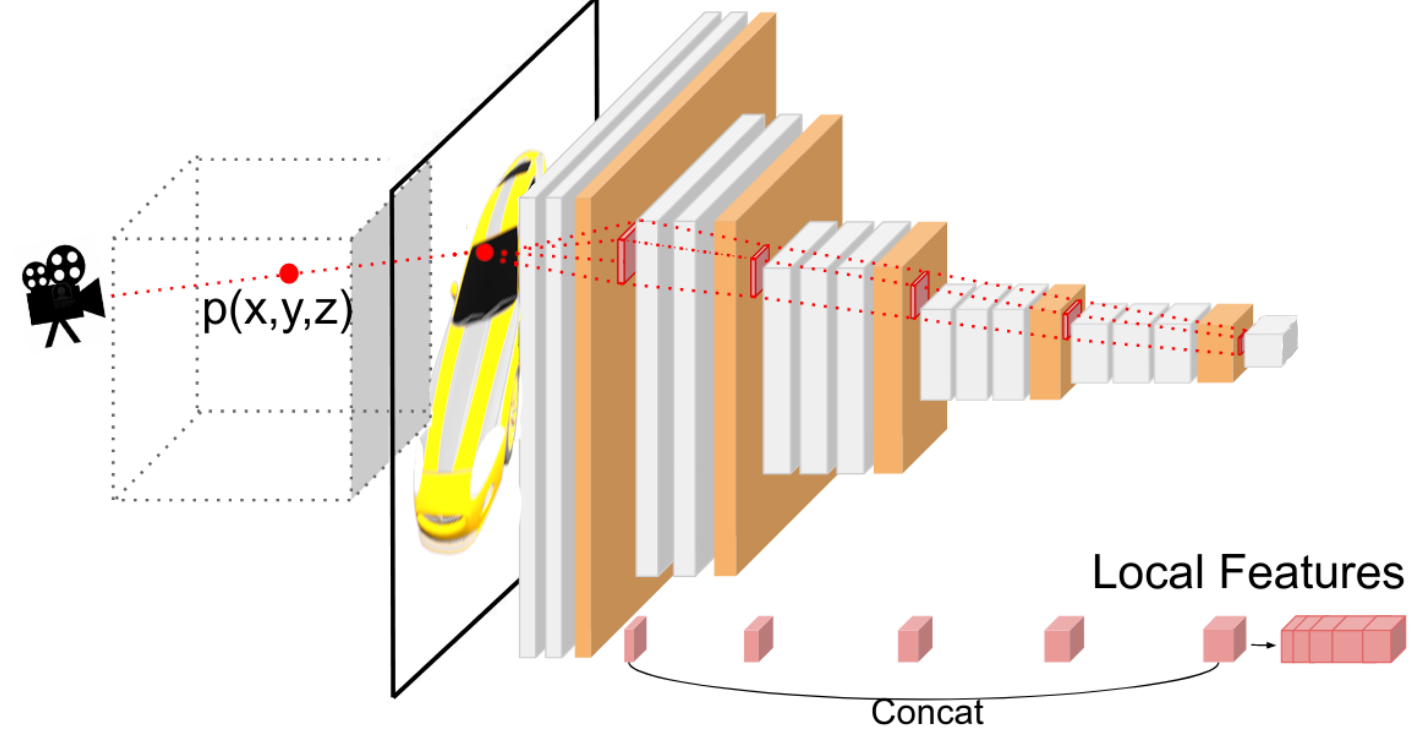
This work aimed to reconstruct 3D scenes from an RGB image. The pipeline adopted a two-part architecture: the first part utilized a UNet that predicted a depth map from an RGB image input, which was then voxelized into an incomplete occupancy grid. This grid was subsequently fed into the second part, IF-Net, which completed the incomplete data. The primary goal was to combine the ability to complete partial, incomplete inputs to watertight meshes, retaining both local and global details, with the capability to generate those partial inputs autonomously from RGB images. The results showcased the viability of IF-Nets for the reconstruction of large, intricate scenes. Furthermore, the project extended IF-Nets with a depth regressor and differential voxelization, enabling an end-to-end trainable 3D scene prediction network.
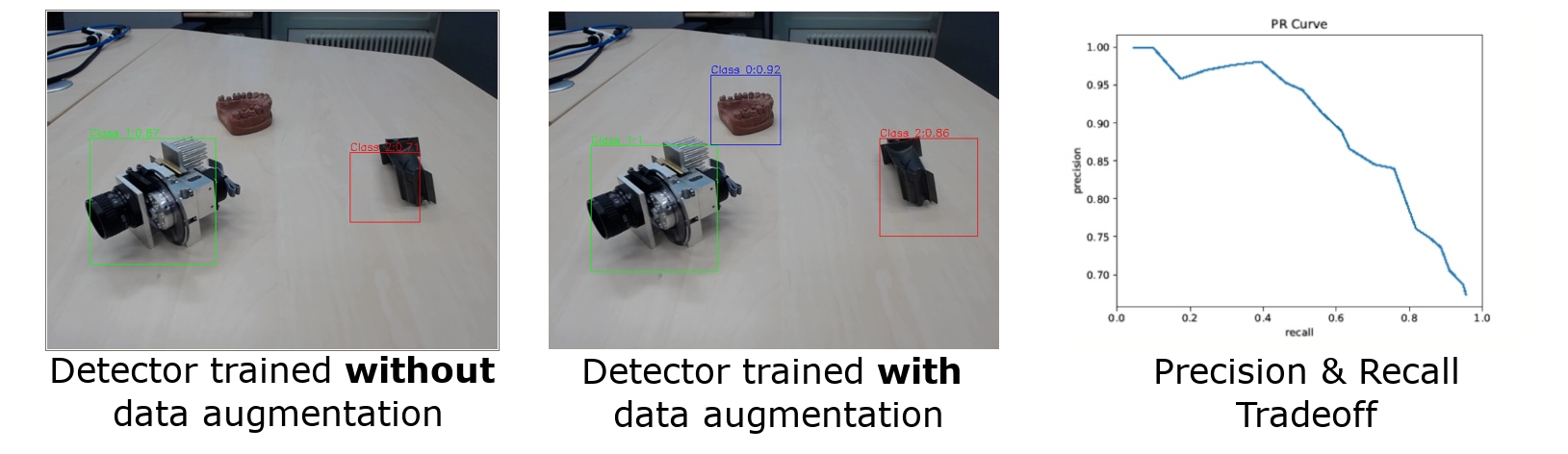
The project introduces a classical object detection pipeline for three classes, utilizing selective search for proposing regions, Histogram of Oriented Gradients (HOG) for feature extraction, random forests for window classification, and Non-Maximum Suppression (NMS) for final bounding box determination. The implementation is done in C++ using OpenCV.
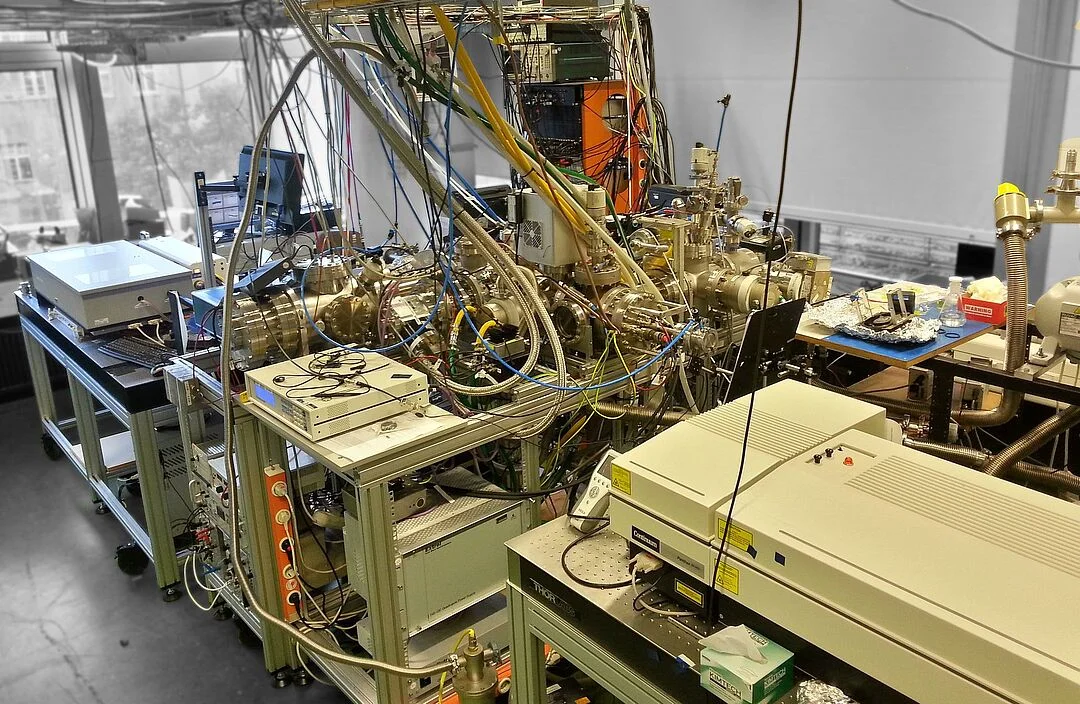
BerlinTrap combines a cryogenic 22-pole ion trap, electrospray ion source, helium buffer gas cooling, and an orthogonal reflectron time-of-flight mass spectrometer, achieving sub-20 K temperatures. It analyzes protonated amino acids, and other protonated/metallated bio molecules, and provides UV photodissociation and visible electronic photodissociation spectra, validated by quantum chemical calculations, for precise determination of molecule structure and vibration spectra.